
[이뉴스코리아 손은경 기자] 장애물을 감지하고 피해갈 수 있는 알고리즘 기술을 갖춘 드론이더라도 공중에서 맞닥뜨린 모든 장애물을 피할 수는 없다.
미 IT전문매체 벤처비트는 홍콩시립대학교 과학자들은 최근 ‘쥐며느리’의 몸을 둥글게 마는 습성에서 영감을 받아 비행 중 다른 물체와의 충돌로 인한 추락 시 기체 보호를 위해 몸을 둥글게 마는 드론을 개발했다고 17일(현지시간) 보도했다. 과학자들은 이 드론에 대한 상세한 설명을 논문에 기재하기도 했다.
쿼드콥터 (quadcopter)의 일종인 이 드론은 로터(회전날개)가 네 개를 이용해 뜨고 추진하는 멀티콥터이다. 일반적으로 쿼드콥터의 각 로터는 연직 아래를 향해 있으며, 2개는 시계 방향으로, 나머지 2개는 반시계방향으로 회전한다. 이들 로터의 회전 속도를 조절함으로써 쿼드콥터의 움직임을 제어할 수 있다.
홍콩시립대 과학자들이 개발한 일명 ‘쥐며느리 드론’은 비행 중 다른 물체와의 충돌 시 카메라, 컴퓨터, 열센서와 같은 손상에 민감한 부품을 보호하기 위해 기체의 구조를 재구성한다.
논문의 공저자이자 쥐며느리 드론의 개발자는 “사고 발생을 피하려는 시도에도 불구하고 예상치 못한 상황이 펼쳐지면 비행을 불안정하게 만드는 원치 않는 충돌 상황으로 이어질 가능성이 높다”며 “추락으로 인한 충격은 드론을 파괴하는 손상을 초래할 수 있다”고 전했다.
쥐며느리 드론 기체의 접이식 메커니즘은 단단한 드론의 기체가 잘 휘는 4개의 경첩을 따라 변형되는 식으로 작동된다.
섬유 유리 사이에 끼어 있는 폴리이미드 접이식 팔, 접이식 연결구조, 접이식 트리거(trigger) 등으로 구성된 14.9g짜리 드론 기체는 무게를 줄이기 위해 비행 시 4개의 접이식 팔을 쫙 편 상태를 유지하도록 설계됐다.
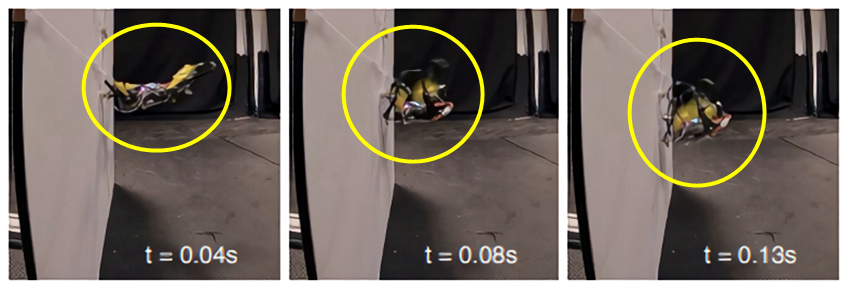
단, 장애물과의 충돌 시에는 접이식 트리거를 회전 시켜 접이식 팔의 일부를 안쪽으로 밀면서 마치 꽃봉오리가 오므라든 형태로 바뀐다.
개발자는 “(위의 기능은) 추락으로부터 드론 기체를 보호한다”며 “개발된 시제품은 예기치 못한 상황을 극복하기 위해 지능형 기계 설계를 도입했다”고 전했다.
홍콩시립대 과학자들은 이 드론의 성능을 검증하기 위해 시속 2.4km의 속도로 비행 중인 드론을 지상으로 떨어뜨렸는데, 그 결과 기체가 바닥에 추락하기 0.2초 전에 몸을 둥글게 마는 성능이 제대로 활성화된 것을 확인할 수 있었다고 한다.
개발자는 “이 제안된 메커니즘은 위나 아래로부터 가해지는 충돌로부터 드론을 보호하지는 않는다”며 “하지만, 드론의 본래 기능은 실제 비행서 검증됐다”고 밝혔다.
저작권자 © 이뉴스코리아 무단전재 및 재배포 금지
