
[이뉴스코리아 손은경 기자] UC버클리 산하 생체모방연구소(Biomimetic Millisystems Lab) 연구진이 지난 2016년 개발한 점프로봇 ‘살토(Salto)’의 성능이 나날이 업그레이드되고 있다고 1일(현지시간) 미 IT전문매체 씨넷이 영상을 통해 소식을 전했다.
재난 현장에서 운용할 목적으로 개발된 이 로봇은 재난 현장에서 로봇을 사용하려면 작으면서도 빈 공간을 빠르게 이동할 수 있는 로봇이 필요하다는 연구진의 생각에서 비롯돼 개발 추진됐다.
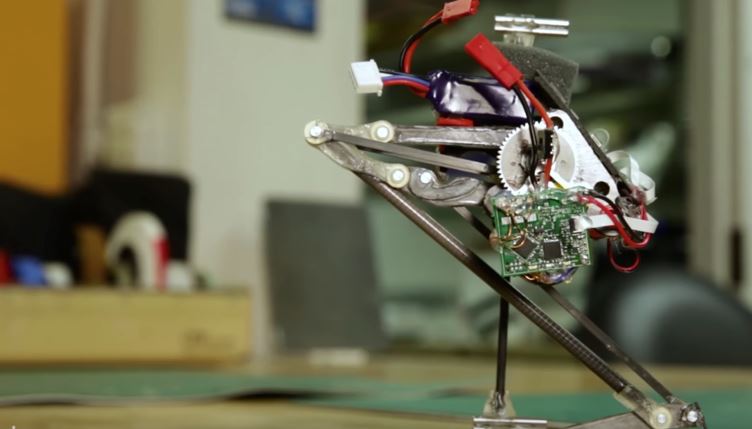
이에 연구진들은 점프한 뒤 수직으로 된 벽을 한 번 더 차고 오르는 갈라고(galago) 원숭이의 동작을 모방해 로봇을 제작했다. 연구진은 갈라고 원숭이가 다리를 웅크렸다 펴는 동작을 반복하면서 연속으로 점프할 수 있다는 점에 주목해 로봇 관절을 스프링 구조로 만들어 1차 점프의 착지가 2차 점프의 도움닫기 역할을 하게 만들었다. 26㎝ 크기의 소형 로봇은 최대 4피트(약 120cm)를 뛰어오른다.
현재 살토는 거듭되는 진화 과정을 거쳐 여러번 점프할 수 있는 능력을 갖게 됐으며 점프 가능 지속 시간도 연장됐다.
처음에는 연속 두 번밖에 점프하지 못했던 살토는 지난 2017년 2개의 추진기를 부착하면서 성능이 업그레이드됐다. 이후 거듭되는 연구에 살토는 최대 10분 동안 점프를 할 수 있게 됐며 점프 가능 횟수도 100회로 늘었다. 또 움직이는 타켓을 쫓아갈 수 있으며 점프 방향을 자유자재로 바꿔서 장애물도 넘을 수 있다.
살토를 개발한 UC버클리 연구진들은 모션 캡처 연구실서 이 로봇의 움직임을 분석하며 새로운 모션을 추가하고 있다.
또 연구진들은 모션 캡처 환경에서만 운용 가능했던 이 로봇을 업그레이드해 외부 공간에서도 점핑하면서 이동할 수 있도록 새로운 시스템을 도입했다. 진화된 이 로봇은 자율적으로 동작하는 것이 아닌 사람이 콘트롤러를 이용해 무선 조작하는 방식으로 운용된다. 현재 연구실을 떠나 캠퍼스 곳곳을 돌아다니며 성능을 검진받고 있다.
이번 연구를 주도한 ‘저스틴 임(Justin Yim)은 “살토가 언젠가 재난 현장에서 유용하게 쓰이기를 바란다”고 매체에 전했다.
